

ໃນຊຸມປີມໍ່ໆມານີ້, ເຄື່ອງວັດແທກຄວາມໄວລົດກົນຈັກໄດ້ຖືກປ່ຽນແທນດ້ວຍລະບົບການວັດແທກຄວາມໄວເອເລັກໂຕຣນິກ, ເຊິ່ງເຊັນເຊີຄວາມໄວມີບົດບາດສໍາຄັນ.ທຸກສິ່ງທຸກຢ່າງກ່ຽວກັບເຊັນເຊີຄວາມໄວທີ່ທັນສະໄຫມ, ປະເພດຂອງພວກເຂົາ, ການອອກແບບແລະການດໍາເນີນງານ, ເຊັ່ນດຽວກັນກັບການເລືອກທີ່ຖືກຕ້ອງແລະການທົດແທນຂອງພວກເຂົາ - ອ່ານໃນບົດຄວາມນີ້.
ເຊັນເຊີຄວາມໄວແມ່ນຫຍັງ
ເຊັນເຊີຄວາມໄວ (ເຊັນເຊີຄວາມໄວຍານພາຫະນະ, DSA) ເປັນອົງປະກອບທີ່ລະອຽດອ່ອນຂອງລະບົບການວັດແທກຄວາມໄວຍານພາຫະນະເອເລັກໂຕຣນິກ;ເຊັນເຊີຕິດຕໍ່ ຫຼື ບໍ່ຕິດຕໍ່ທີ່ວັດແທກຄວາມໄວເປັນລ່ຽມຂອງເພົາຢູ່ໃນກະເປົ໋າເກຍ ຫຼື ໃນເກຍຂອງເພົາຂັບ ແລະ ສົ່ງຜົນການວັດແທກໄປຫາຕົວຄວບຄຸມຄວາມໄວ ຫຼື ເຄື່ອງວັດແທກຄວາມໄວຂອງລົດ.
ກະລຸນາສັງເກດ: ບົດຄວາມສົນທະນາພຽງແຕ່ DSA ສໍາລັບການວັດແທກຄວາມໄວຂອງລົດ.ກ່ຽວກັບເຊັນເຊີຄວາມໄວລໍ້ປະຕິບັດການເປັນສ່ວນຫນຶ່ງຂອງລະບົບຄວາມປອດໄພທີ່ມີການເຄື່ອນໄຫວ (ABS ແລະອື່ນໆ), ອະທິບາຍໃນບົດຄວາມອື່ນໆຢູ່ໃນເວັບໄຊທ໌ຂອງພວກເຮົາ.
ເຊັນເຊີຄວາມໄວສາມາດເປັນສ່ວນຫນຶ່ງຂອງລະບົບຕ່າງໆຂອງຍານພາຫະນະທີ່ທັນສະໄຫມ:
● Speedometer - ເພື່ອວັດແທກແລະຊີ້ບອກຄວາມໄວຂອງການເຄື່ອນໄຫວໃນປະຈຸບັນແລະໄລຍະທາງທີ່ເດີນທາງ (ໃຊ້ odometer);
●ການສີດ, ignition ແລະລະບົບເຄື່ອງຈັກອື່ນໆ - ເພື່ອແກ້ໄຂຮູບແບບການເຮັດວຽກຂອງຫນ່ວຍງານພະລັງງານ, ຂຶ້ນກັບຄວາມໄວຂອງລົດແລະການປ່ຽນແປງຂອງມັນ (ໃນລະຫວ່າງການເລັ່ງແລະເບກ);
● ລະບົບຄວາມປອດໄພ ແລະລະບົບແຈ້ງເຕືອນ – ເພື່ອແກ້ໄຂຄວາມໄວ ແລະເສັ້ນທາງຂອງລົດໃນໂໝດຕ່າງໆ, ການເຕືອນສະຖານະການທີ່ອາດຈະເປັນອັນຕະລາຍ, ແລະອື່ນໆ;
● ໃນລົດບາງຄັນ - ລະບົບພວງມາໄລ ແລະລະບົບສະດວກສະບາຍ.
DSA, ຄືກັບການຂັບສາຍແບບດັ້ງເດີມຂອງເຄື່ອງວັດແທກຄວາມໄວ, ແມ່ນຕິດຢູ່ເທິງເກຍເກຍ, ກໍລະນີໂອນ ຫຼື ເກຍເກຍເພົາ, ຕິດຕາມຄວາມໄວເປັນລ່ຽມຂອງ shaft ສອງຫຼືກາງ.ຂໍ້ມູນທີ່ໄດ້ຮັບຈາກເຊັນເຊີໃນຮູບແບບຂອງສັນຍານໄຟຟ້າຖືກສົ່ງໄປຫາຕົວຄວບຄຸມຄວາມໄວຫຼືໂດຍກົງກັບເຄື່ອງວັດແທກຄວາມໄວ.ຄຸນລັກສະນະຂອງສັນຍານທີ່ຜະລິດໄດ້ແລະວິທີການເຊື່ອມຕໍ່ / ການເຊື່ອມໂຍງ sensors ກັບເອເລັກໂຕຣນິກຍານພາຫະນະແມ່ນຂຶ້ນກັບປະເພດ, ການອອກແບບແລະຫຼັກການຂອງການດໍາເນີນງານ.ນີ້ຕ້ອງໄດ້ຮັບການອະທິບາຍລາຍລະອຽດເພີ່ມເຕີມ.
ການທໍາງານ, ປະເພດ, ການອອກແບບແລະຫຼັກການຂອງການດໍາເນີນງານຂອງເຊັນເຊີຄວາມໄວ
ເຊັນເຊີຄວາມໄວ, ໂດຍບໍ່ຄໍານຶງເຖິງປະເພດແລະການອອກແບບ, ສ້າງສັນຍານທີ່ສາມາດຖືກສົ່ງໂດຍກົງໄປຫາເຄື່ອງວັດແທກຄວາມໄວຫຼືໄປຫາເຄື່ອງຄວບຄຸມເຄື່ອງຈັກແລະຫນ່ວຍຄວບຄຸມເອເລັກໂຕຣນິກທີ່ກ່ຽວຂ້ອງ.ໃນກໍລະນີທໍາອິດ, ເຊັນເຊີຖືກໃຊ້ພຽງແຕ່ເພື່ອກໍານົດຄວາມໄວຂອງຍານພາຫະນະ.ໃນກໍລະນີທີສອງ, ຂໍ້ມູນຖືກນໍາໃຊ້ໂດຍເຄື່ອງເອເລັກໂຕຣນິກລົດຍົນເພື່ອຄວບຄຸມເຄື່ອງຈັກແລະລະບົບອື່ນໆ, ແລະສັນຍານໄປຫາເຄື່ອງວັດແທກຄວາມໄວແມ່ນປ້ອນຈາກເຄື່ອງຄວບຄຸມ.ໃນຍານພາຫະນະທີ່ທັນສະໄຫມ, ວິທີການທີສອງຂອງການເຊື່ອມຕໍ່ແມ່ນຖືກນໍາໃຊ້ເພີ່ມຂຶ້ນ.
ການວັດແທກຄວາມໄວດ້ວຍ DSA ແມ່ນຂ້ອນຂ້າງງ່າຍດາຍ.ເຊັນເຊີສ້າງສັນຍານກໍາມະຈອນ (ປົກກະຕິແລ້ວເປັນຮູບສີ່ຫລ່ຽມໃນຮູບ), ເຊິ່ງອັດຕາການຄ້າງຫ້ອງຂອງກໍາມະຈອນແມ່ນຂຶ້ນກັບຄວາມໄວຂອງການຫມຸນຂອງ shaft ແລະ, ຕາມຄວາມເຫມາະສົມ, ຄວາມໄວຂອງລົດ.ເຊັນເຊີທີ່ທັນສະໄຫມສ່ວນໃຫຍ່ຜະລິດຈາກ 2000 ຫາ 25000 pulses ຕໍ່ກິໂລແມັດ, ແຕ່ມາດຕະຖານທີ່ໃຊ້ຫຼາຍທີ່ສຸດແມ່ນ 6000 pulses ຕໍ່ກິໂລແມັດ (ສໍາລັບເຊັນເຊີຕິດຕໍ່ - 6 pulses ຕໍ່ການປະຕິວັດຂອງ rotor ຂອງເຂົາເຈົ້າ).ດັ່ງນັ້ນ, ການວັດແທກຄວາມໄວໄດ້ຖືກຫຼຸດລົງກັບການຄິດໄລ່ໂດຍຜູ້ຄວບຄຸມອັດຕາການຄ້າງຫ້ອງຂອງກໍາມະຈອນທີ່ມາຈາກ DSA ຕໍ່ຫນ່ວຍຂອງເວລາ, ແລະການແປພາສາຂອງມູນຄ່ານີ້ເປັນ km / h ເຂົ້າໃຈໄດ້ກັບພວກເຮົາ.
ເຊັນເຊີຄວາມໄວແບ່ງອອກເປັນສອງກຸ່ມໃຫຍ່:
●ຂັບເຄື່ອນໂດຍກົງໂດຍ shaft, ຫຼືຕິດຕໍ່;
● Contactless.
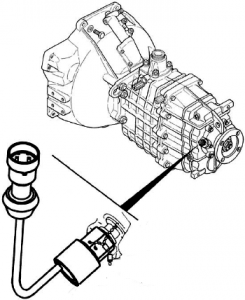
ການຕິດຕັ້ງເຊັນເຊີຄວາມໄວຕິດຕໍ່ທີ່ກ່ອງເກຍ
ກຸ່ມທໍາອິດປະກອບມີເຊັນເຊີທີ່ torque ຈາກ shaft ກ່ອງເກຍ, ແກນຫຼືກໍລະນີການໂອນໄດ້ຖືກຖ່າຍທອດໂດຍວິທີການຂອງເກຍຂັບລົດແລະສາຍເຫຼັກທີ່ມີຄວາມຍືດຫຍຸ່ນ (ຫຼື shaft ແຂງສັ້ນ).ເຊັນເຊີສະຫນອງອຸປະກອນທີ່ອ່ານການຫມຸນເປັນລ່ຽມຂອງ shaft ແລະປ່ຽນເປັນ impulses ໄຟຟ້າ.ເຊັນເຊີຂອງປະເພດນີ້ແມ່ນຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງ, ຍ້ອນວ່າພວກເຂົາສາມາດຕິດຕັ້ງແທນການຂັບຂີ່ຂອງເຄື່ອງວັດແທກຄວາມໄວກົນຈັກ (ເຊິ່ງຊ່ວຍໃຫ້ທ່ານສາມາດຍົກລະດັບຍານພາຫະນະເກົ່າໂດຍບໍ່ມີຄ່າໃຊ້ຈ່າຍເພີ່ມເຕີມ) ແລະມີຄວາມຫນ້າເຊື່ອຖືສູງ.

ໜ້າປັດເຊັນເຊີຄວາມໄວແບບບໍ່ຕິດຕໍ່
ກຸ່ມທີສອງປະກອບມີເຊັນເຊີທີ່ບໍ່ມີການຕິດຕໍ່ໂດຍກົງກັບ shaft rotating.ເພື່ອວັດແທກຄວາມໄວຂອງເຊັນເຊີດັ່ງກ່າວ, ອຸປະກອນຊ່ວຍແມ່ນຕິດຕັ້ງຢູ່ໃນ shaft - ແຜ່ນຕົ້ນສະບັບຫຼື rotor.ອຸປະກອນ contactless ກໍາລັງກາຍເປັນທີ່ນິຍົມຫລາຍຂຶ້ນ, ພວກເຂົາເຈົ້າໄດ້ຖືກຕິດຕັ້ງຢູ່ໃນຫຼາຍຮຸ່ນຂອງລົດພາຍໃນປະເທດໃນປະຈຸບັນ.
ເຊັນເຊີທັງຫມົດປະຕິບັດງານຢູ່ໃນຫຼັກການທາງດ້ານຮ່າງກາຍທີ່ແຕກຕ່າງກັນ.ໃນອຸປະກອນຕິດຕໍ່, ຜົນກະທົບ Hall ແລະຜົນກະທົບ magnetoresistive (MRE), ເຊັ່ນດຽວກັນກັບ optocouplers (ຄູ່ optoelectronic), ຖືກນໍາໃຊ້ຫຼາຍທີ່ສຸດ.ຫົວໃຈຂອງເຊັນເຊີທີ່ບໍ່ມີການຕິດຕໍ່, ຜົນກະທົບ Hall ແມ່ນຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງທີ່ສຸດ, ແລະ MRE ຫນ້ອຍລົງ.ການອອກແບບແລະຫຼັກການການດໍາເນີນງານຂອງແຕ່ລະປະເພດຂອງເຊັນເຊີແມ່ນໄດ້ອະທິບາຍຂ້າງລຸ່ມນີ້.
ເຊັນເຊີຕິດຕໍ່ໂດຍອີງໃສ່ຜົນກະທົບ Hall
ເຊັນເຊີຂອງປະເພດນີ້ແມ່ນອີງໃສ່ຜົນກະທົບຂອງ Hall: ຖ້າ conductor ຮາບພຽງ, ຜ່ານສອງດ້ານກົງກັນຂ້າມຂອງກະແສໄຟຟ້າໂດຍກົງ, ແມ່ນຖືກຈັດໃສ່ໃນສະຫນາມແມ່ເຫຼັກ, ແຮງດັນໄຟຟ້າເກີດຂື້ນໃນດ້ານກົງກັນຂ້າມຂອງມັນ.ຫົວໃຈຂອງ DSA ແມ່ນຊິບ Hall, ເຊິ່ງ wafer (ປົກກະຕິແລ້ວເຮັດດ້ວຍ permalloy) ແລະວົງຈອນເຄື່ອງຂະຫຍາຍສຽງໄດ້ຖືກປະສົມປະສານແລ້ວ.ໃນເຊັນເຊີ, microcircuit ແລະແມ່ເຫຼັກຍັງຄົງຢູ່, ແລະການປ່ຽນແປງຂອງສະຫນາມແມ່ເຫຼັກແມ່ນດໍາເນີນເນື່ອງຈາກ "ຜ້າມ່ານ" ໝູນ - ວົງແຫວນທີ່ມີຊ່ອງສຽບ.ວົງແຫວນແມ່ນເຊື່ອມຕໍ່ກັບສາຍຂັບຫຼື shaft, ຈາກທີ່ມັນໄດ້ຮັບການຫມຸນ.ສັນຍານຜົນຜະລິດຈາກ DSA ຖືກສົ່ງໄປຫາເຄື່ອງວັດແທກຄວາມໄວຫຼືຕົວຄວບຄຸມໂດຍຜ່ານຕົວເຊື່ອມຕໍ່ມາດຕະຖານ, ໂດຍຜ່ານທີ່ພະລັງງານໄດ້ຖືກສະຫນອງໃຫ້ແກ່ຊິບ Hall.
ເຊັນເຊີທີ່ບໍ່ມີການຕິດຕໍ່ໂດຍອີງໃສ່ຜົນກະທົບ Hall
DSA ທີ່ບໍ່ແມ່ນການຕິດຕໍ່ແມ່ນອີງໃສ່ຜົນກະທົບດຽວກັນ, ແຕ່ບໍ່ມີພາກສ່ວນເຄື່ອນທີ່ໃນມັນ - ແທນທີ່ຈະ, rotor ຫຼືແຜ່ນກໍາມະຈອນທີ່ມີພາກສ່ວນແມ່ເຫຼັກແມ່ນຕັ້ງຢູ່ເທິງ shaft ຂອງຫນ່ວຍງານ (gearbox, ແກນ gearbox).ມີຊ່ອງຫວ່າງຂະຫນາດນ້ອຍລະຫວ່າງສ່ວນທີ່ລະອຽດອ່ອນຂອງເຊັນເຊີ (ມີຊິບ Hall) ແລະ rotor, ເມື່ອ rotor rotates, ສັນຍານກໍາມະຈອນຈະຖືກສ້າງຂຶ້ນໃນ microcircuit, ເຊິ່ງຖືກສົ່ງໄປຫາຕົວຄວບຄຸມໂດຍຜ່ານຕົວເຊື່ອມຕໍ່ມາດຕະຖານ.
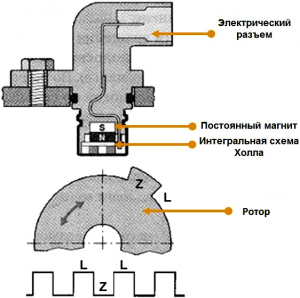
ໂຄງການຂອງການດໍາເນີນງານຂອງເຊັນເຊີຄວາມໄວບໍ່ຕິດຕໍ່ພົວພັນ
ເຊັນເຊີຕິດຕໍ່ໂດຍອີງໃສ່ຜົນກະທົບ magnetoresistive

ການອອກແບບເຊັນເຊີຄວາມໄວດ້ວຍອົງປະກອບ magnetoresistive
ປະເພດຂອງ DSA ນີ້ແມ່ນອີງໃສ່ຜົນກະທົບ magnetoresistive - ຊັບສິນຂອງອຸປະກອນການຈໍານວນຫນຶ່ງທີ່ຈະມີການປ່ຽນແປງການຕໍ່ຕ້ານໄຟຟ້າຂອງເຂົາເຈົ້າໃນເວລາທີ່ວາງໄວ້ໃນສະຫນາມແມ່ເຫຼັກ.ເຊັນເຊີດັ່ງກ່າວແມ່ນຄ້າຍຄືກັນກັບເຊັນເຊີ Hall, ແຕ່ພວກມັນໃຊ້ຊິບທີ່ມີອົງປະກອບ magnetoresistive ປະສົມປະສານ (MRE) ໂດຍອີງໃສ່ວັດສະດຸ semiconductor.ສ່ວນຫຼາຍມັກ, ເຊັນເຊີເຫຼົ່ານີ້ມີການຂັບເຄື່ອນໂດຍກົງ, ການປ່ຽນແປງຂອງສະຫນາມແມ່ເຫຼັກແມ່ນດໍາເນີນໂດຍການຫມຸນວົງແຫວນແມ່ເຫຼັກຫຼາຍຂົ້ວ, ສັນຍານທີ່ຜະລິດໄດ້ຖືກສະຫນອງໃຫ້ກັບຕົວຄວບຄຸມໂດຍຜ່ານຕົວເຊື່ອມຕໍ່ມາດຕະຖານ (ໂດຍຜ່ານການສະຫນອງພະລັງງານຂອງ microcircuit ກັບ. MRE ແມ່ນສະຫນອງໃຫ້).
ເຊັນເຊີຕິດຕໍ່ Optoelectronic
DSAs ເຫຼົ່ານີ້ແມ່ນງ່າຍດາຍທີ່ສຸດໃນການອອກແບບ, ແຕ່ພວກມັນມີຄວາມອ່ອນໄຫວຫນ້ອຍແລະ inertial ຫຼາຍກ່ວາທີ່ອະທິບາຍຂ້າງເທິງ.ເຊັນເຊີແມ່ນອີງໃສ່ optocoupler - LED ແລະ phototransistor, ລະຫວ່າງທີ່ມີແຜ່ນທີ່ມີຊ່ອງສຽບທີ່ເຊື່ອມຕໍ່ກັບ shaft ໄດ.ໃນເວລາທີ່ແຜ່ນ rotates, flux luminous ລະຫວ່າງ LED ແລະ phototransistor ຖືກລົບກວນເປັນໄລຍະ, ການຂັດຂວາງເຫຼົ່ານີ້ແມ່ນຂະຫຍາຍໃຫຍ່ຂື້ນແລະຖືກສົ່ງໄປຫາຕົວຄວບຄຸມໃນຮູບແບບຂອງສັນຍານກໍາມະຈອນ.
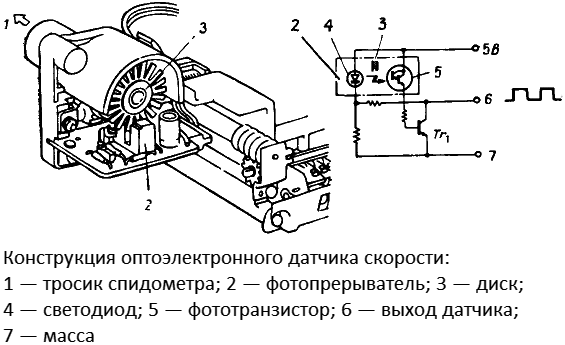
ການອອກແບບເຊັນເຊີຄວາມໄວ optoelectronic
ວິທີການເລືອກແລະປ່ຽນເຊັນເຊີຄວາມໄວທີ່ຖືກຕ້ອງ
ເຊັນເຊີຄວາມໄວທີ່ຜິດພາດໃນຍານພາຫະນະທີ່ທັນສະໄຫມສາມາດເປັນແຫຼ່ງຂອງບັນຫາຕ່າງໆ - ຈາກການສູນເສຍຂໍ້ມູນກ່ຽວກັບຄວາມໄວຂອງການເຄື່ອນໄຫວແລະໄລຍະທາງທີ່ເດີນທາງ (ເຄື່ອງວັດແທກຄວາມໄວແລະ odometer ຢຸດເຮັດວຽກ), ຈົນເຖິງການລົບກວນຂອງຫນ່ວຍງານໄຟຟ້າ (ການຢຸດທີ່ບໍ່ສະຖຽນລະພາບ, ການບໍລິໂພກນໍ້າມັນເພີ່ມຂຶ້ນ, ການສູນເສຍພະລັງງານ), ການຊີ້ນໍາພະລັງງານແລະລະບົບຄວາມປອດໄພ.ດັ່ງນັ້ນ, ຖ້າ DSA ທໍາລາຍ, ມັນຄວນຈະຖືກປ່ຽນແທນໄວເທົ່າທີ່ຈະໄວໄດ້.
ສໍາລັບການທົດແທນ, ທ່ານຄວນເອົາພຽງແຕ່ເຊັນເຊີທີ່ຢູ່ໃນລົດກ່ອນຫນ້ານັ້ນ, ຫຼືນໍາໃຊ້ອຸປະກອນຈາກບັນດາທີ່ແນະນໍາໂດຍຜູ້ຜະລິດລົດໃຫຍ່.ໃນບາງກໍລະນີ, ມັນເປັນໄປໄດ້ທີ່ຈະເລືອກເອົາ DSA "ທີ່ບໍ່ແມ່ນພື້ນເມືອງ", ແຕ່ສ່ວນຫຼາຍແມ່ນເປັນໄປບໍ່ໄດ້ - ເຊັນເຊີບໍ່ຕົກຢູ່ໃນບ່ອນ, ຫຼືໃຫ້ການອ່ານທີ່ບໍ່ຖືກຕ້ອງໃນລະຫວ່າງການຕິດຕັ້ງ.ດັ່ງນັ້ນ, ການທົດລອງທີ່ມີການຄັດເລືອກ DSA ຄວນໄດ້ຮັບການນໍາໃຊ້ພຽງແຕ່ໃນກໍລະນີທີ່ຮ້າຍແຮງ.
ການປ່ຽນເຊັນເຊີແມ່ນດໍາເນີນໄປຕາມຄໍາແນະນໍາສໍາລັບຍານພາຫະນະສະເພາະນີ້ (ຫຼືກ່ອງເກຍ, ແກນຫຼືກໍລະນີການໂອນ).Direct drive DSAs ປົກກະຕິແລ້ວມີກະທູ້ turnkey ແລະ hexagon (ແຕ່ບໍ່ແມ່ນສະເຫມີໄປ - ບາງຜະລິດຕະພັນມີວົງທີ່ມີ corrugation transverse), ສະນັ້ນການທົດແທນໃຫ້ເຂົາເຈົ້າມາກັບຫັນອອກອຸປະກອນເກົ່າແລະ screwing ໃນອັນໃຫມ່.ເຊັນເຊີທີ່ບໍ່ມີການຕິດຕໍ່ແມ່ນປົກກະຕິແລ້ວຕິດດ້ວຍຫນຶ່ງຫຼືສອງ screws (bolts) threaded ຜ່ານຮູຢູ່ໃນ flange.ໃນທຸກກໍລະນີ, ການເຮັດວຽກທັງຫມົດຕ້ອງໄດ້ຮັບການປະຕິບັດກັບ terminal ອອກຈາກຫມໍ້ໄຟ, ກ່ອນທີ່ຈະ dismantling ເຊັນເຊີ, ມັນຈໍາເປັນຕ້ອງໄດ້ຕັດການເຊື່ອມຕໍ່ໄຟຟ້າ, ແລະກ່ອນທີ່ຈະຕິດຕັ້ງໃຫມ່, ເຮັດຄວາມສະອາດສະຖານທີ່ຂອງການຕິດຕັ້ງຂອງມັນ.
ມັນເປັນການຍາກກວ່າທີ່ຈະທົດແທນ rotor ຂອງເຊັນເຊີທີ່ບໍ່ມີການຕິດຕໍ່ - ສໍາລັບການນີ້, ມັນຈໍາເປັນຕ້ອງໄດ້ disassemble ຫນ່ວຍບໍລິການບາງສ່ວນ (ກ່ອງ, ຂົວ), ແລະຫຼັງຈາກນັ້ນປະຕິບັດການສ້ອມແປງຕາມຄໍາແນະນໍາ.
ດ້ວຍການເລືອກທີ່ຖືກຕ້ອງແລະການປ່ຽນເຊັນເຊີຄວາມໄວ, ເຄື່ອງວັດແທກຄວາມໄວແລະລະບົບຕ່າງໆໃນລົດ (ລວມທັງເຄື່ອງຈັກ) ເລີ່ມເຮັດວຽກທັນທີ.ໃນອະນາຄົດ, DSA ຈະຮັບປະກັນການດໍາເນີນງານທີ່ປອດໄພແລະສະດວກສະບາຍຂອງຍານພາຫະນະ.
ເວລາປະກາດ: ກໍລະກົດ-12-2023